ISSLg - Cours
d'électronique - Électronique (ELO)
Les transistors en commutation
Navigation> electronique/elo/transistors/commutation
Principe
de base
C'est une utilisation de transistors bipolaire ou E-MOSFET comme
interrupteur pour piloter des LED, des relais, des moteurs, des
buzzers, des chargeurs de batteries, des alimentations à
découpage, des onduleurs...
Si, en analogique, le transistor est polarisé pour rester toujours
passant, en commutation, l'état passant est à proscrire
(échauffement du transistor et perte de rendement).
En commutation, le transistor est soit bloqué
(équivalent à un interrupteur OFF), soit saturé
(équivalent à un interrupteur ON).
De plus, les passages de l'état bloqué à saturé et inversement
doivent se faire en quelques dizaines de nanosecondes (flancs de
commande bien raide).
L'état bloqué (OFF) est obtenu :
Pour un bipolaire : avec
un courant de base nul;
Pour un E-MOSFET : avec
une tension de grille nulle.
L'état saturé (ON) est obtenu :
Pour un bipolaire : avec
un courant de base largement supérieur (3x plus grand) à
Ic/Hfe;
Pour un E-MOSFET : avec
une tension de grille largement supérieure (3x plus grande) à
Vgsth.
La puissance est en tout ou rien (ON/OFF), mais elle peut être
modulée par PWM (modulation du rapport ON/OFF à une fréquence de
hachage).
L'avantage de ce mode de fonctionnement est un très bon rendement
et un faible échauffement des transistors.
Il ne faut pas oublier les diodes de roue libre si la charge est
selfique (relais, moteur, inductance...).
C'est un mode de fonctionnement très utilisé en électronique de
puissance, mais à proscrire en HiFi.
Bipolaire, darlington ou E-MOSFET ?
Le E-MOSFET est nettement plus avantageux que le bipolaire en
commutation : moins de pertes et d'échauffement, plus costauds,
pour les (demi-)ponts les diodes de roue libre sont intégrées dans
les E-MOSFET de par leur fabrication (jonction substrat-drain =
diode en anti-parallèle)...
Pour des courants inférieur à 100mA, on utilise généralement des
bipolaires.
Pour des courants entre 100mA et 1A, il faut utiliser des
darlingtons, il existe des CI comme le ULN2803 qui contiennent 8
darlingtons (+ R de commande et D de roue libre).
Pour des courants supérieurs à 1A, on utilise généralement des
E-MOSFET.
Le
PWM
Le "Pulse Width Modulation" (modulation de largeur d'impulsion)
permet de faire varier la tension moyenne appliquée à une charge
(LED, moteur, résistance de chauffage...). La fréquence de
découpage (f = 1/T) doit être suffisamment rapide, pour être
masquée par la persistance rétinienne de l'oeil (LED clignotant
tellement vite que l'on ne perçoit plus le clignotement : f =
70Hz), ou par l'inertie du moteur (n'a pas le temps de s'arrêter),
ou encore par l'inertie thermique de la résistance chauffante (n'a
pas le temps de refroidir).
Le transistor de commande applique à la charge une succession de
temps allumés (ton) et de temps éteints (toff) à une période (T)
fixe. La fréquence de hachage (f) est l'inverse de la période : T
= ton + toff = cte = 1/f
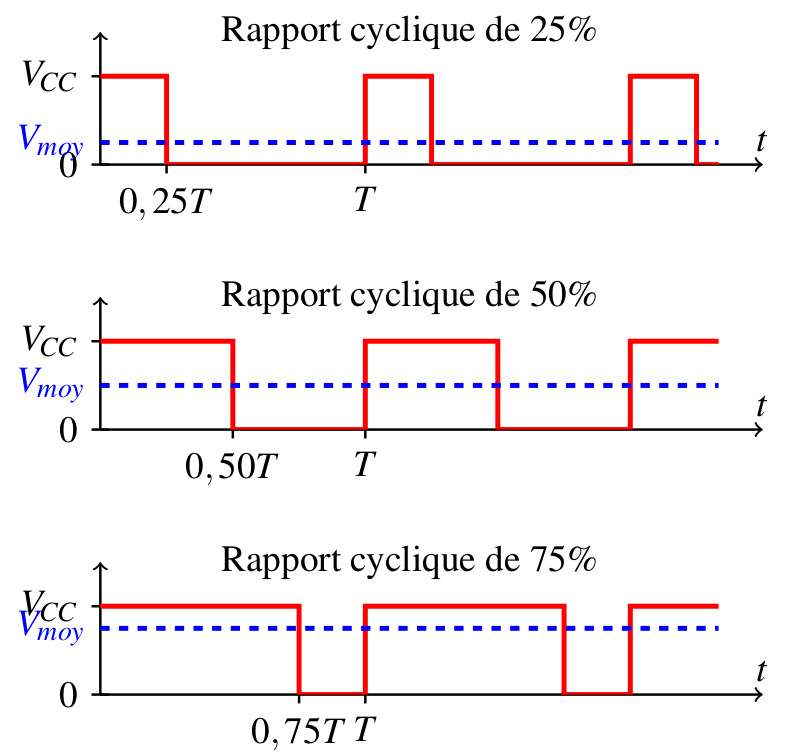
Ce type de signal est caractérisé par son rapport cyclique :
Rapport_cyclique = ton / T = ton * f
(x100 si on veut l'exprimer de 0% à 100%)
La tension moyenne appliquée à la charge est alors de :
Vmoy = Rapport_cyclique * Vcc
Source : https://physique-microcontroleurs.readthedocs.io/fr/latest/3_bases/2_pwm_led.html
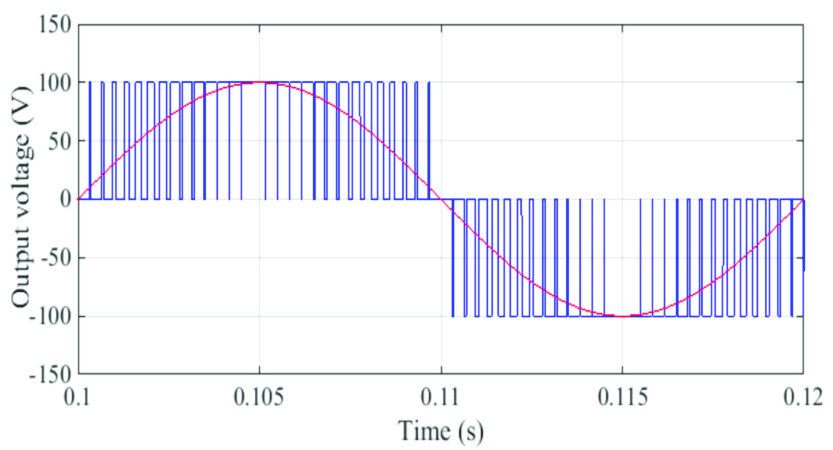
Avec des (demi-)ponts, il
est possible de recréer par exemple une sinusoïde en faisant
varier le rapport cyclique dans le temps. La fréquence de cette
sinusoïde doit être beaucoup (100x) plus faible que celle de
hachage.
Source : https://www.researchgate.net/figure/Ideal-pulse-width-modulation-PWM-inverter-output-voltage-instantaneous-component-blue_fig4_319071311
Commande
d'une mise au GND avec un µC
Il n'y a pas de
restriction pour Vcc (sauf la limite de Q1 -> voir datasheet).
Le transistor de commande est connecté au GND par son émetteur (NPN) ou sa source (E-MOSFET canal N).
La charge est placée en pull-up entre Vcc et le collecteur
(NPN) ou le drain (E-MOSFET canal N) du transistor de commande.
La commande se fait par une sortie logique Dx ou PWMx du µC
appliquée sur la base ou la grille.
La commande n'est pas inversée dans ce montage :
Si Dx=0V => le
transistor Q1 est bloqué => il n'y a pas de courant dans
la charge RL.
Si Dx=5V => le transistor Q1 est
saturé => le courant circule dans la charge RL.
Calculer d'abord le courant dans la charge : Ic = Vcc / RL
Si Ic < 100mA
La commande se fait avec un simple NPN (ex BC547) avec le
montage suivant :
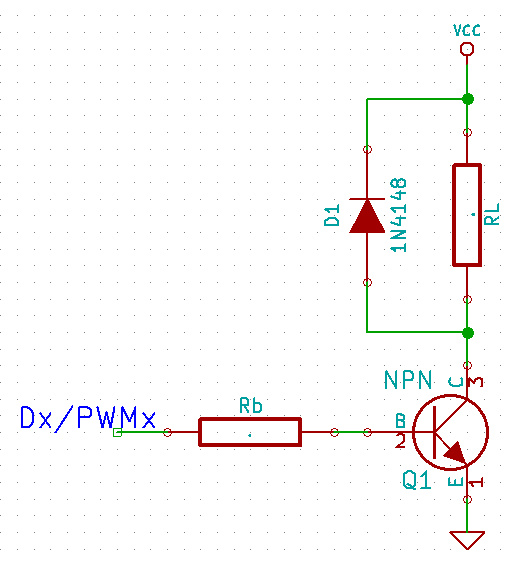
Une simple diode de signal
D1=1N4148 fait office de roule libre pour éviter les surtensions
lorsque Q1 devient bloquant.
Calculer le courant de saturation pour la base : Ib = 5 * (Ic /
Hfe)
Calculer la résistance de base Rb = (5V - 0V7) / Ib
Si 100mA < Ic < 1A
La commande se fait avec un darlington NPN
(ex TIP122) avec le montage suivant :
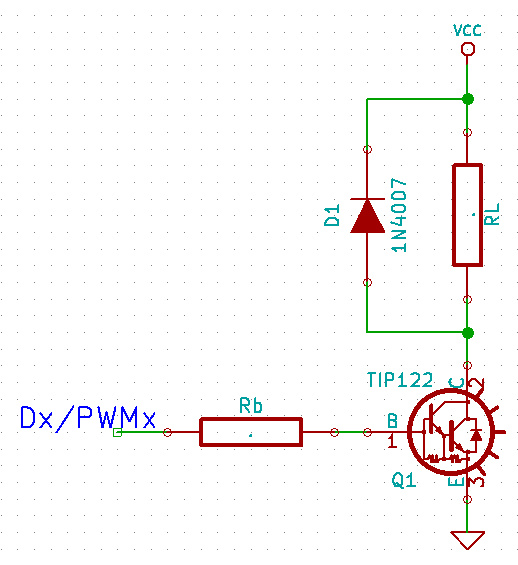
NB : Le
darlington doit être équipé de résistances entre B & E pour
une coupure rapide (évacuation des porteurs des bases).
Une simple diode de
redressement D1=1N4007 fait office de roule libre pour éviter
les surtensions lorsque Q1 devient bloquant.
Calculer le courant de saturation pour la base : Ib = 5 * (Ic /
Hfe)
NB : ici Hfe est supérieur à 1000
Calculer la résistance de base Rb = (5V - 1V4) / Ib
Si 1A < Ic
La
commande se fait avec un E-MOSFET canal N (ex STP16NF06L)
avec le montage suivant :
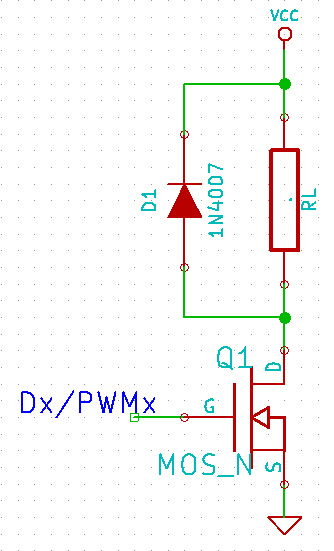
Une simple diode de
redressement D1=1N4007 fait office de roule libre pour éviter les
surtensions lorsque Q1 devient bloquant.
La grille est directement commandée par le µC (Vérifier que
Vgsth<<5V).
Commande d'une mise au 5V avec un µC
ATTENTION : uniquement si Vcc < ou = tension
d'alimentation du µC (5V)
Le transistor de
commande est connecté au 5V par son émetteur (PNP) ou sa source (E-MOSFET canal P).
La charge est placée en pull-down entre le GND et le
collecteur (PNP) ou le drain (E-MOSFET canal P) du transistor de
commande.
La commande se fait par une sortie logique Dx ou PWMx du µC
appliquée sur la base ou la grille.
ATTENTION : La commande est inversée dans ce montage :
Si Dx=5V => le
transistor Q1 est bloqué => il n'y a pas de courant dans
la charge RL.
Si Dx=0V => le transistor Q1 est
saturé => le courant circule dans la charge RL.
Calculer d'abord le courant dans la charge : Ic = Vcc / RL
Si Ic < 100mA
La commande se fait avec un simple PNP (ex BC557) avec le
montage suivant :
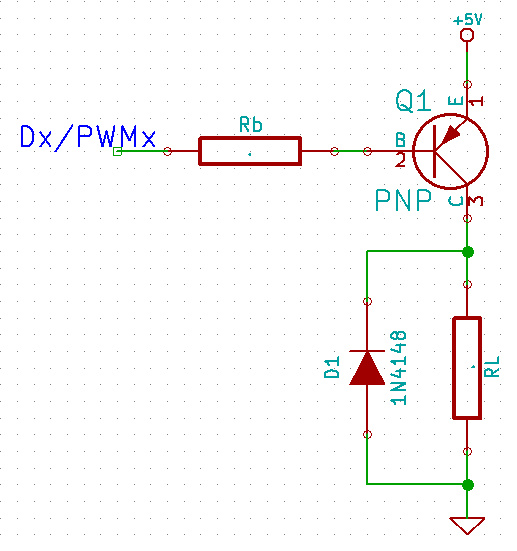
Une simple diode de signal
D1=1N4148 fait office de roule libre pour éviter les sous-tensions
lorsque Q1 devient bloquant.
Calculer le courant de saturation pour la base : Ib = 5 * (Ic /
Hfe)
Calculer la résistance de base Rb = (5V - 0V7) / Ib
Si 100mA < Ic < 1A
La commande se fait avec un darlington PNP
(ex TIP127) avec le montage suivant :
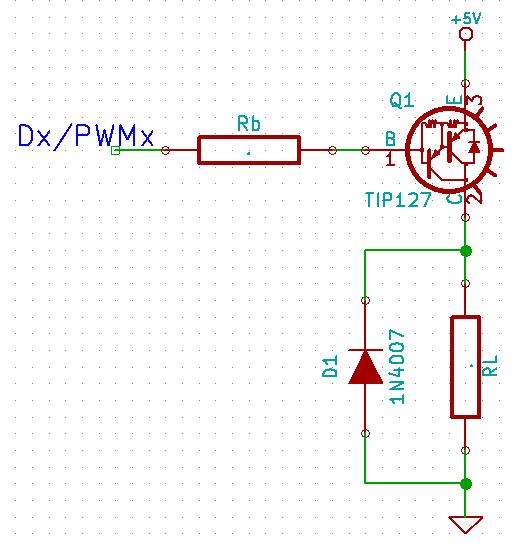
NB : Le
darlington doit être équipé de résistances entre B & E pour
une coupure rapide (évacuation des porteurs de la base).
Une simple diode de
redressement D1=1N4007 fait office de roule libre pour éviter
les sous-tensions lorsque Q1 devient bloquant.
Calculer le courant de saturation pour la base : Ib = 5 * (Ic /
Hfe)
NB : ici Hfe est supérieur à 1000
Calculer la résistance de base Rb = (5V - 1V4) / Ib
Si 1A < Ic
La
commande se fait avec un E-MOSFET canal P (ex NDP6020P) avec
le montage suivant :
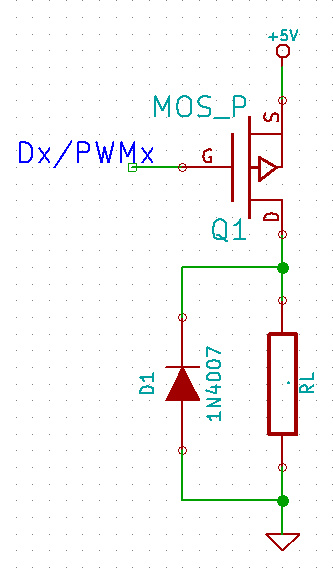
Une simple diode de
redressement D1=1N4007 fait office de roule libre pour éviter les
sous-tensions lorsque Q1 devient bloquant.
La grille est directement commandée par le µC.
Commande d'une mise à Vcc avec un µC
Si Vcc > tension d'alimentation
du PIC (5V)
Le transistor de commande
est connecté au Vcc par son émetteur
(PNP) ou sa source (E-MOSFET canal P).
La charge est placée en pull-down entre le GND et le
collecteur (PNP) ou le drain (E-MOSFET canal P) du transistor de
commande.
La commande se fait par une sortie logique Dx ou PWMx du µC et une
adaptation des niveaux logiques avec un NPN (Q2).
La commande n'est
pas inversée dans ce montage :
Si Dx=0V => les
transistors Q1 & Q2 sont bloqués => il n'y a pas de
courant dans la charge RL.
Si Dx=5V => les transistors Q1 & Q2
sont saturés => le courant circule dans la charge RL.
Calculer d'abord le courant dans la charge : Ic1 = Vcc / RL
Si Ic1 < 1A
La commande se fait avec le montage suivant :
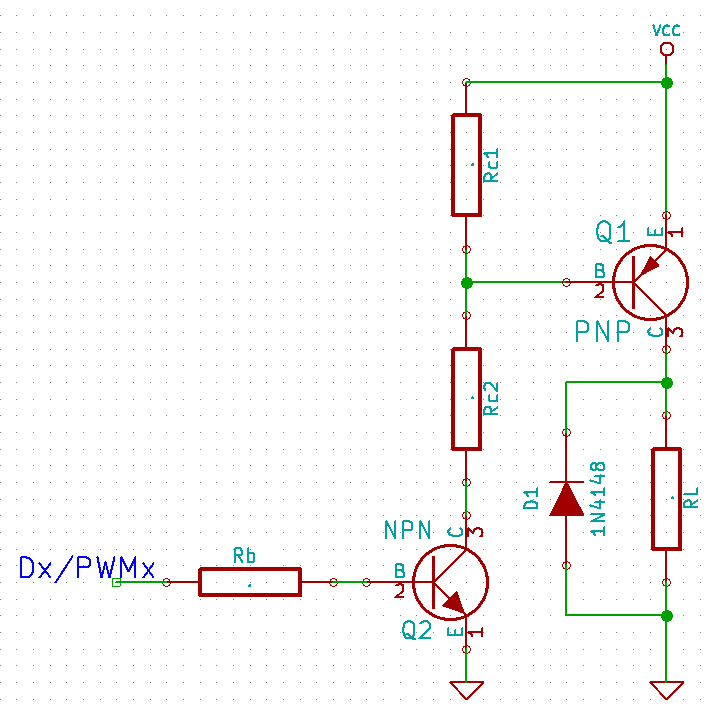
Une simple diode de redressement D1=1N4007
fait office de roule libre pour éviter les sous-tensions lorsque
Q1 devient bloquant.
Calculer le courant de saturation pour la base de Q1 : Ib1 = 5 *
(Ic1 / Hfe1)
Calculer la résistance de collecteur Rc2 = (Vcc - 0V7 - 0V3) /
Ib1
Pour une coupure rapide de Q1 prendre Rc1 = Rc2
Calculer le courant de
saturation pour la base de Q2 : Ib2 = 5 * (Ib1 / Hfe2)
Calculer
la résistance de base de Q2 : Rb = (5V - 0V7) / Ib2
NB : Q2 permet d'amplifier le courant de base de Q1, ce qui permet
d'atteindre les 1A dans le collecteur de Q1
Si 1A < Ic1
La commande se fait avec le montage suivant :
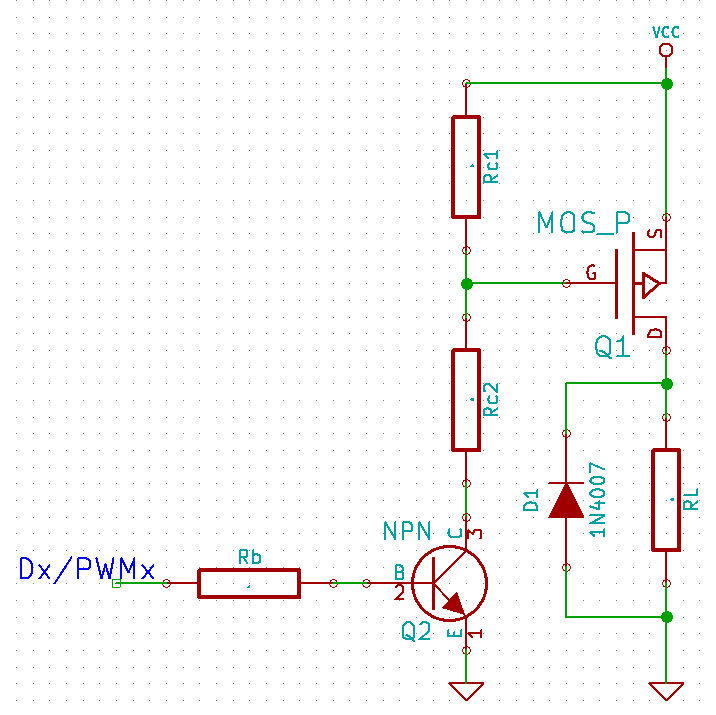
Rc1 = 1k
et Rb = 4k7
Si la grille de Q1 peut supporter -Vcc (voir datasheet) alors Rc2
est inutile (la remplacer par un court-circuit) ; sinon faire un
diviseur potentiométrique avec Rc1 & Rc2.
Le
demi-pont
Utilisé pour des moteurs,
des relais bi-stables, des piézzos, des onduleurs avec
transformateur à point milieu...
Si Vcc < ou = tension d'alimentation du µC (5V)
Utilisez le montage suivant :
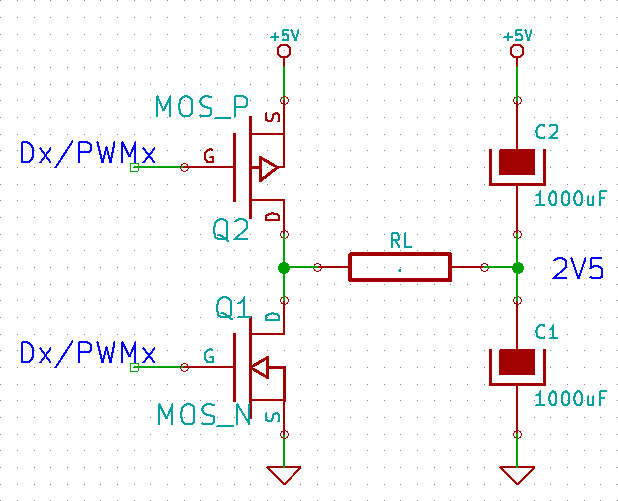
La charge est placée entre
Vcc/2 (formé par C1 et C2) et les deux drains des transistors de
commande.
La commande se fait par une sortie logique Dx ou PWMx du µC
appliquée sur les grilles.
ATTENTION : La commande est inversée dans ce montage :
Si Dx=5V => Q1
saturé & Q2 bloqué => une tension de -2V5 est
appliquée sur la charge RL.
Si Dx=0V => Q1
bloqué & Q2 saturé => une tension de +2V5 est
appliquée sur la charge RL.
Si tension d'alimentation du µC (5V) < Vcc
Passez par une adaptation des niveaux logiques via un NPN
avec le montage suivant :
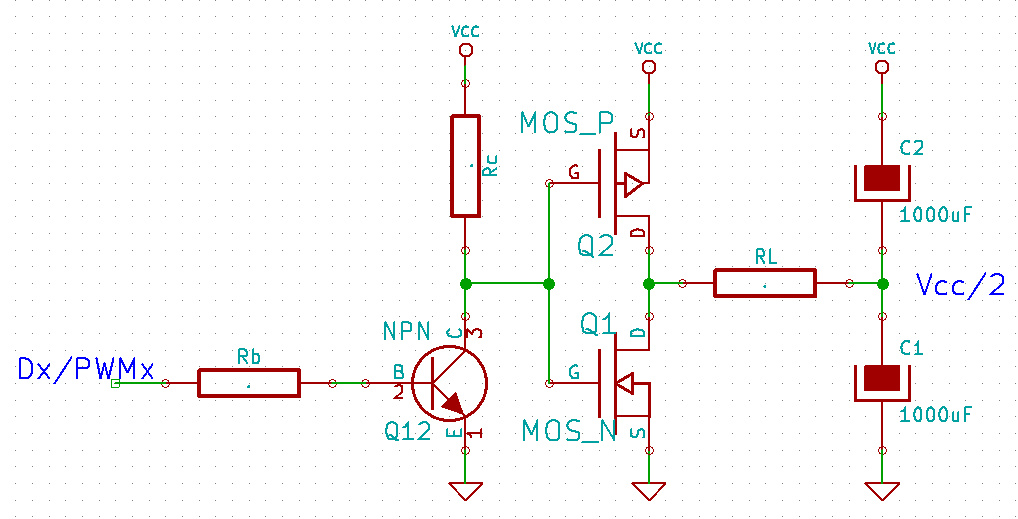
Rc = 1k
et Rb = 3k3
La charge est placée entre
Vcc/2 (formé par C1 et C2) et les deux drains des transistors de
commande.
La commande se fait par une sortie logique Dx ou PWMx du µC
appliquée sur les grilles via l'adaptation des niveaux logiques
par Q12.
La commande n'est pas inversée dans ce montage :
Si Dx=0V => Q12
bloqué => Q1 saturé & Q2 bloqué => une tension de
-2V5 est appliquée sur la charge RL.
Si Dx=5V => Q12 saturé
=> Q1 bloqué & Q2 saturé => une tension de
+2V5 est appliquée sur la charge RL.
Remarque avec le µC PIC16F690
Q1 est commandé par la broche P1B(RC4).
Q2 est commandé par la broche P1A(RC5).
Ce µC permet alors d'alors d'appliquer le PWM soit sur Q1 (et en
bloquant Q2) soit sur Q2 (et en bloquant Q1).
De plus, l'inversion de commande peut être programmée sur chaque
transistor (par exemple si on passe par un NPN pour la commande).
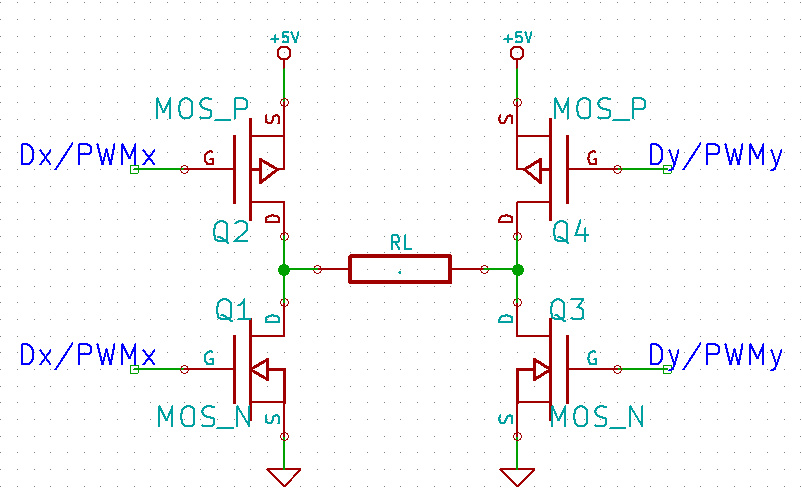
Le
pont en H
Très utilisé pour
commander le sens de rotation et la vitesse de moteurs DC, des
moteurs AC, des relais bistables (Set/Reset via une bobine),
commander des buzzers, des sirènes ou des HP à pleine puissance...
(NB : il existe des Pont en H en CI pour 5€ à 10€)
La charge est placée entre 2 demi-ponts, ce qui permet de couper,
d'appliquer ou d'inverser la tension d'alimentation appliquée sur
la charge.
NB : pour des moteurs brushless ou des onduleurs
triphasés, on utilise 3 demi-ponts.
Si Vcc < ou = tension d'alimentation du µC (5V)
Utilisez le montage suivant :
Dx/PWMx
|
Q1/Q2
|
Dy/PWMy
|
Q3/Q4
|
borne gauche de RL
|
borne droite de RL
|
Tension aux bornes de RL
|
0
|
B/S
|
0
|
B/S
|
5V
|
5V
|
0V
|
0
|
B/S
|
1
|
S/B
|
5V
|
0V
|
5V
|
1
|
S/B
|
0
|
B/S
|
0V
|
5V
|
-5V
|
1
|
S/B
|
1
|
S/B
|
0V
|
0V
|
0V
|
États des transistors Q1, Q2, Q3, Q4 : B = bloqué
/ S = saturé
Si tension d'alimentation du µC (5V) < Vcc
Passez par une adaptation des niveaux logiques via des NPN
avec le montage suivant :
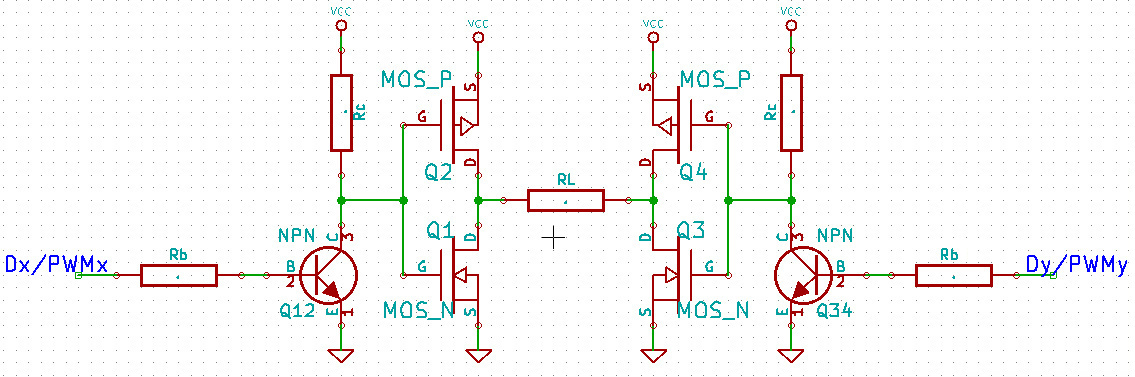
Remarque avec le µC
PIC16F690
Q1 est commandé par la broche P1B(RC4).
Q2 est commandé par la broche P1A(RC5).
Q3 est commandé par la
broche P1D(RC2).
Q4 est commandé par la broche P1C(RC3).
Ce µC permet alors d'alors d'appliquer le PWM soit
sur Q1 (Q2 & Q3 bloqué + Q4 passant) soit sur Q3 (Q1 & Q4 bloqué + Q2 passant).
De plus, l'inversion de commande peut être programmée sur chaque
transistor (par exemple si on passe par un NPN pour la commande).
Remarque pour les hautes tensions
Lorsque Vcc = 50V, 400V ou plus, l'adaptation des niveaux logiques
ne peut plus se faire avec des NPN. Il faut alors passer par des
opto-coupleurs et de petites alimentations "flottantes" pour
commander les grilles (on peut alors travailler uniquement avec
des E-MOSFET canal N)
Auteur : Philippot Marc -
23/05/2021